Kostenloser Standardversand ab 39 € Bestellwert
Jetzt zum ELV-Newsletter anmelden und einen 10 € Gutschein erhalten
- Downloads
- ELVjournal
- Angaben zur Produktsicherheit
Artikel pro Seite:
Seite 1 von 1
Artikel-Nr. 254105
Mehr Wissen in Elektronik: Bausätze - Bodenfeuchte kapazitiv messen und ins LoRaWAN®-Netzwerk integrieren - Bodenfeuchtesensor SoMo1 - LoRaWAN®-Interface für UART- und I2C-Sensoren - ELV LoRaWAN®-Interface 1 ELV-LW-INT1 - Distanzen per Ultraschall messen und ins LoRaWAN®-Netzwerk integrieren - Ultraschall Distanzsensor DUS1 - Digitale Nase - ELV Applikationsmodul Luftgüte ELV-AM-AQ1 zur Messung der Luftqualität
Sofort zum Download verfügbar
Artikel pro Seite:
Seite 1 von 1
Weitere Beiträge
Artikel-Nr. 254209
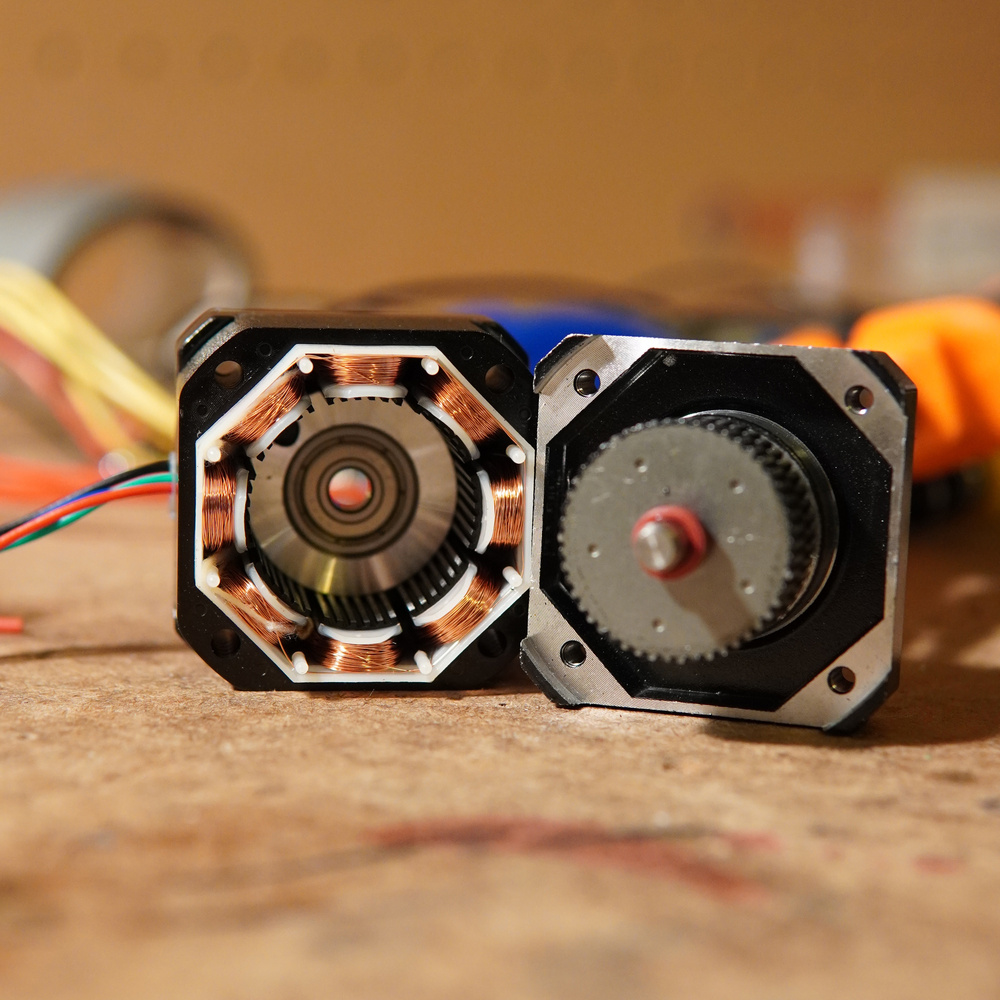
In diesem Teil der Folge über Schrittmotoren wollen wir uns den bipolar angesteuerten Typen im NEMA-Format zuwenden. Der Schrittmotor wird mithilfe eines Raspberry Pi angesteuert und nach einigen Vorbereitungen kann der Motor mithilfe eines Python-Sketchs in Betrieb genommen werden.
Sofort zum Download verfügbar
Artikel-Nr. 254147
Nachdem im Grundlagenteil dieser Artikelserie die verschiedenen Arten von Schrittmotoren, ihr Aufbau, die Art der Wicklungsbestromung sowie ihre Vor- und Nachteile theoretisch erläutert wurden, geht es in diesem Artikel um den praktischen Betrieb eines Steppermotors am Raspberry Pi.
Sofort zum Download verfügbar
Artikel-Nr. 254718
Eine für Lernzwecke hervorragend geeignete Paarung aus NEMA23-Schrittmotor 23SSM8440-EC1000 und Controller/Treiber HBS57 wird in diesem Teil der Folge behandelt.
Sofort zum Download verfügbar
Weitere Beiträge
Artikel-Nr. 254209
In diesem Teil der Folge über Schrittmotoren wollen wir uns den bipolar angesteuerten Typen im NEMA-Format zuwenden. Der Schrittmotor wird mithilfe eines Raspberry Pi angesteuert und nach einigen Vorbereitungen kann der Motor mithilfe eines Python-Sketchs in Betrieb genommen werden.
Sofort zum Download verfügbar
Artikel-Nr. 254147
Nachdem im Grundlagenteil dieser Artikelserie die verschiedenen Arten von Schrittmotoren, ihr Aufbau, die Art der Wicklungsbestromung sowie ihre Vor- und Nachteile theoretisch erläutert wurden, geht es in diesem Artikel um den praktischen Betrieb eines Steppermotors am Raspberry Pi.
Sofort zum Download verfügbar
Artikel-Nr. 254718
Eine für Lernzwecke hervorragend geeignete Paarung aus NEMA23-Schrittmotor 23SSM8440-EC1000 und Controller/Treiber HBS57 wird in diesem Teil der Folge behandelt.
Sofort zum Download verfügbar
Jetzt zum ELV-Newsletter anmelden und 10 € Gutschein erhalten.
Ja, ich möchte ab sofort über interessante Angebote informiert werden. Zum Datenschutz