Kostenloser Standardversand ab 39 € Bestellwert
Jetzt zum ELV-Newsletter anmelden und einen 10 € Gutschein erhalten
- Downloads
- ELVjournal
Artikel pro Seite:
Artikel-Nr. 254156
Mehr Wissen in Elektronik: Bausätze - USB-I2C-Interface - I2C-Bausteine mit dem Computer steuern und auswerten - LED-Tester LED-T2 - Bedrahtete und SMD-LEDs vielfältig testen - Präziser Detektor - ELV LoRaWAN®-Feinstaubsensor ELV-LW-SPM - Gute Differenzen! - ELV Applikationsmodul Temperatur 2-fach ELV-AM-T2
Sofort zum Download verfügbar
Artikel pro Seite:
Weitere Beiträge
Artikel-Nr. 254209
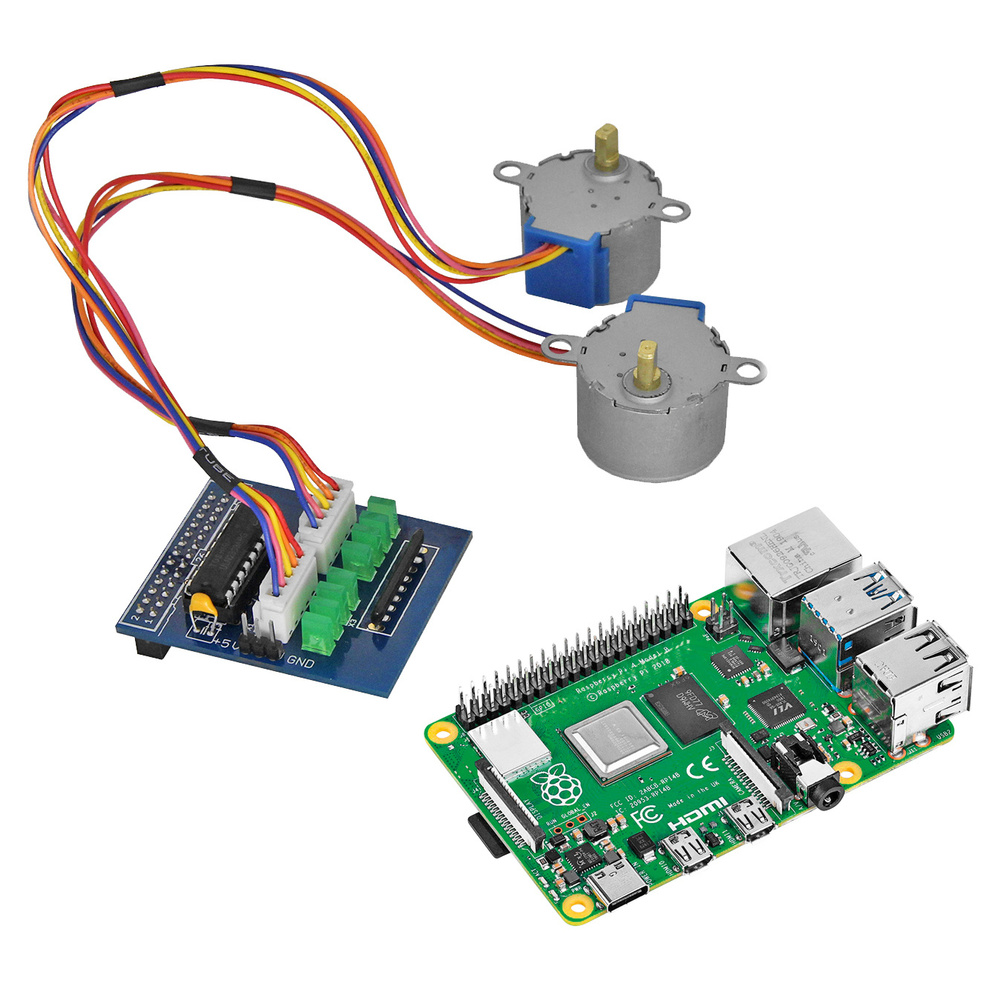
In diesem Teil der Folge über Schrittmotoren wollen wir uns den bipolar angesteuerten Typen im NEMA-Format zuwenden. Der Schrittmotor wird mithilfe eines Raspberry Pi angesteuert und nach einigen Vorbereitungen kann der Motor mithilfe eines Python-Sketchs in Betrieb genommen werden.
Sofort zum Download verfügbar
Artikel-Nr. 254090
Schrittmotoren (engl. stepper motors) dienen wie jede andere Art von elektrischen Motoren der Umwandlung elektrischer Energie in mechanische Energie. Schrittmotoren bestehen aus einem feststehenden Stator und einem sich in Winkelinkrementen drehenden Rotor. Im Gegensatz zu herkömmlichen Elektromotoren rotiert der Rotor nicht kontinuierlich, sondern „gequantelt“, also in mehr oder weniger großen Drehschritten. So erreicht er auch ohne Regelungsmechanismen eine hohe Positioniergenauigkeit. Damit ist das Schrittmotorprinzip ideal geeignet für Anwendungen in der Robotik, in 3D-Druckern, Floppy-Disk- und Festplattenlaufwerken und für Präzisionsanwendungen aller Art und Größenordnungen.
Sofort zum Download verfügbar
Artikel-Nr. 254718
Eine für Lernzwecke hervorragend geeignete Paarung aus NEMA23-Schrittmotor 23SSM8440-EC1000 und Controller/Treiber HBS57 wird in diesem Teil der Folge behandelt.
Sofort zum Download verfügbar
Weitere Beiträge
Artikel-Nr. 254209
In diesem Teil der Folge über Schrittmotoren wollen wir uns den bipolar angesteuerten Typen im NEMA-Format zuwenden. Der Schrittmotor wird mithilfe eines Raspberry Pi angesteuert und nach einigen Vorbereitungen kann der Motor mithilfe eines Python-Sketchs in Betrieb genommen werden.
Sofort zum Download verfügbar
Artikel-Nr. 254090
Schrittmotoren (engl. stepper motors) dienen wie jede andere Art von elektrischen Motoren der Umwandlung elektrischer Energie in mechanische Energie. Schrittmotoren bestehen aus einem feststehenden Stator und einem sich in Winkelinkrementen drehenden Rotor. Im Gegensatz zu herkömmlichen Elektromotoren rotiert der Rotor nicht kontinuierlich, sondern „gequantelt“, also in mehr oder weniger großen Drehschritten. So erreicht er auch ohne Regelungsmechanismen eine hohe Positioniergenauigkeit. Damit ist das Schrittmotorprinzip ideal geeignet für Anwendungen in der Robotik, in 3D-Druckern, Floppy-Disk- und Festplattenlaufwerken und für Präzisionsanwendungen aller Art und Größenordnungen.
Sofort zum Download verfügbar
Artikel-Nr. 254718
Eine für Lernzwecke hervorragend geeignete Paarung aus NEMA23-Schrittmotor 23SSM8440-EC1000 und Controller/Treiber HBS57 wird in diesem Teil der Folge behandelt.
Sofort zum Download verfügbar
Jetzt zum ELV-Newsletter anmelden und 10 € Gutschein erhalten.³
Ja, ich möchte ab sofort über interessante Angebote informiert werden. Zum Datenschutz