Innovative Bauteile kurz beleuchtet (Teil 2)
MEMS-3-Achsen-Beschleunigungssensoren
Das Entwicklerteam von ELV und eQ-3 mit ca. 90 Entwicklern konstruiert jährlich bis zu 120 neue Produkte inklusive Weiterentwicklungen und Produktanpassungen. Internationale Bauteilehersteller informieren uns laufend über aktuelle Bauteile und innovative Sensoren. An diesem Wissen möchten wir Sie gerne teilhaben lassen. Wir stellen Ihnen spannende elektronische Bauteile mit umfassendem Hintergrundwissen, Datenblättern und Anwendungsbeispielen vor. In diesem Beitrag geht es um MEMS-3-Achsen-Beschleunigungssensoren – winzig, genau und vielseitig.
Die MEMS-Technologie
Wenn es um die Miniaturisierung mechanischer Strukturen geht, hat die klassische Feinwerktechnik schon seit Jahrzehnten ihre Grenzen erreicht. Sie ermöglicht zwar die Herstellung von Strukturen mit Abmessungen bis in den Sub-Millimeterbereich (1 mm = 10-3 m), was aber für die Kombination mit halbleiterbasierter Mikroelektronik noch um Größenordnungen zu groß ist.
Um die Sub-Mikrometer- bis Nanometerabmessungen elektronischer Halbleiterstrukturen denen der mit ihnen zusammenarbeitenden mechanischen Komponenten anzugleichen, müssen durchgehend die bei der Chipherstellung eingesetzten Methoden zum Einsatz kommen. Dann lassen sich mechanische Komponenten wie Zahnräder, Kämme, Hebel, Federn, Lager usw. mit Mikroelektronik auf Siliziumchips gemeinsam schaffen und zu einem MEMS (Micro Electro Mechanical System = mikro-elektromechanisches System) kombinieren.
Durch das Zusammenwirken von Lithografie, Material aufdampfen (deposition) durch Sputtern, Maskieren, Material entfernen (etching) durch Ätzen, Oxidation und vielen weiteren Prozessschritten, entstehen auf einem Halbleiterwafer komplexe, extrem miniaturisierte Systeme für enorm vielfältige, sich ständig erweiternde Anwendungsbereiche.
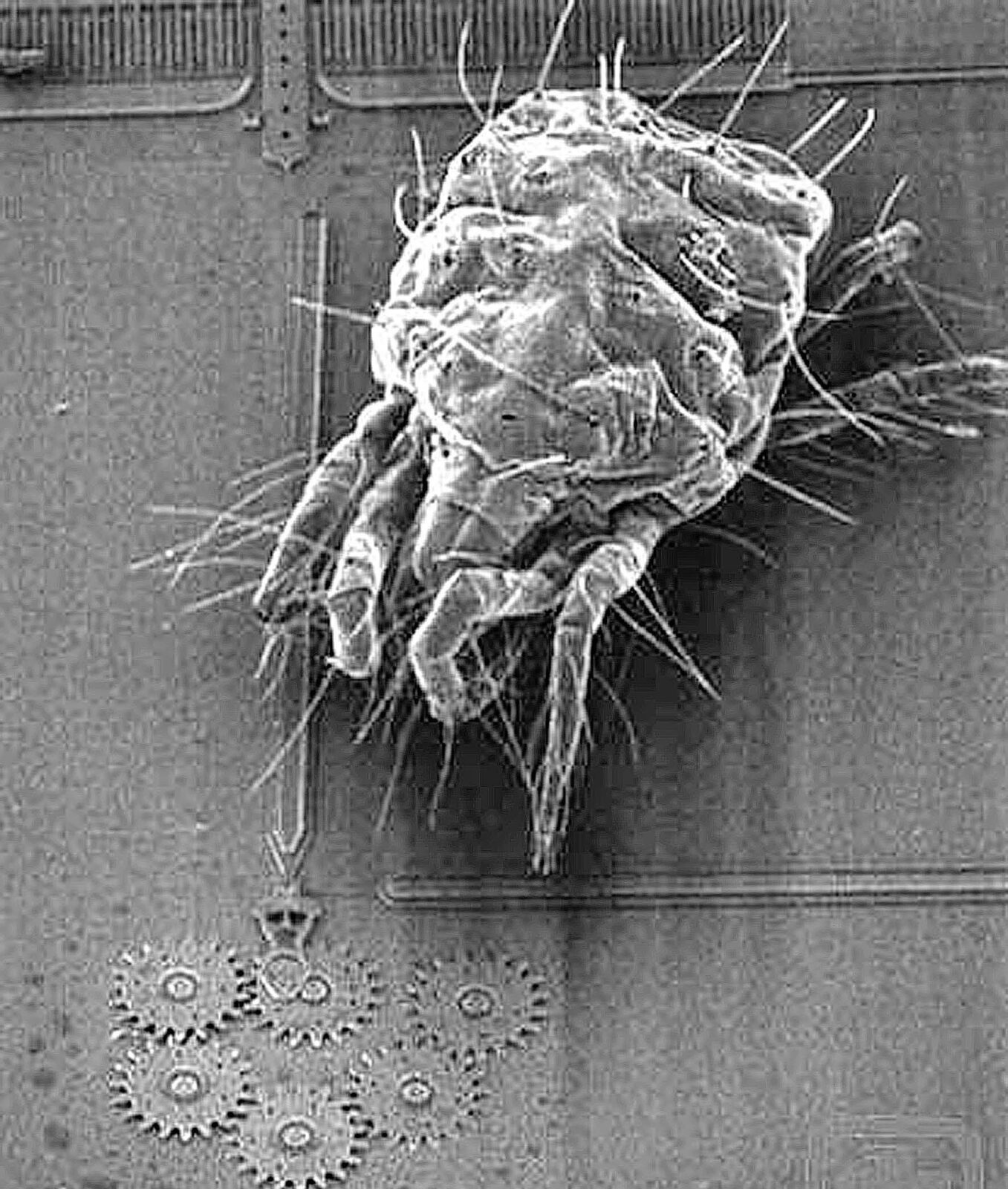
MEMS sind in Automobilbau, Medizintechnik, Elektronik, Kommunikation, Halbleitern, Luft- und Raumfahrt und vielen mehr anzutreffen. MEMS-Produkte werden heute in Airbagsensoren, Tintenstrahldruckköpfen, Lese- und Schreibköpfen von Computerfestplatten, Projektionschips, optischen Schaltern, Mikroventilen, Blutdrucksensoren, Biosensoren, Lagereglungssystemen für Luft- und Raumfahrt und weiteren Geräten eingesetzt. Eine Vorstellung von der Feinheit mikromechanischer Strukturen zeigt Bild 1 in einer elektronenmikroskopischen Aufnahme einer etwa 0,1 mm großen Milbe zusammen mit winzigen, mikromechanisch hergestellten Zahnrädchen mit wenigen µm Durchmesser (Quelle: Sandia National Laboratories). Eine schöne Zusammenfassung zum Thema MEMS ist in der Themenwelt von Bosch oder in Wikipedia zu finden.
Beschleunigung
Unter Beschleunigung a (a: acceleration) versteht man in der Physik, die Zu- oder Abnahme der Geschwindigkeit Δv (v: velocity, dim v: m/s) eines Körpers in einem gewissen Zeitintervall Δt (t: time), es wird also Δv/Δt bestimmt. Weil die Geschwindigkeitsänderung Δv in m/s (Meter/Sekunde) gemessen wird und das Zeitintervall Δt die Einheit s (Sekunde) hat, ist die Einheit der Beschleunigung m/s² (Meter pro Quadratsekunde).
Kennt man die Masse m (m: mass, dim m: kg) des beschleunigten Körpers, kann man mithilfe des 2. Newtonschen Gesetzes F = m · a die Kraft F (F: force, dim F: N) berechnen, die erforderlich ist, um dem Objekt mit der Masse m die Beschleunigung a [a: acceleration, dim a: m/s²] zu erteilen.
F = m · a
Beispiel: Die Masse eines Motorrades einschließlich Fahrer, Beifahrer und Gepäck beträgt 500 kg. Welche Motorkraft ist erforderlich, um es in 10 Sekunden von 0 auf 80 km/h zu beschleunigen?
Antwort: Zunächst 80 km/h in m/s umrechnen:
Diese Geschwindigkeitsänderung soll in 10 s erreicht werden, wofür eine Beschleunigung von a = 2,22 m/s² erforderlich ist. Die Kraft in Newton [N] ist das Produkt aus Masse in kg und Beschleunigung in m/s², also
Die Beschleunigung ist eine vektorielle Größe! Sie wird in einem dreidimensionalen Raum, der durch ein kartesisches Koordinatensystem (mit senkrecht aufeinander stehenden x-, y- und z-Achsen) beschrieben wird, als Pfeil dargestellt. Die Pfeilspitze zeigt in Richtung der Beschleunigung und die Pfeillänge gibt die Stärke der Beschleunigung an (Bild 2). Die vektorielle Eigenschaft wird durch einen nach rechts weisenden Pfeil über dem Variablenbuchstaben gekennzeichnet, z. B. als a (acceleration = Beschleunigung).
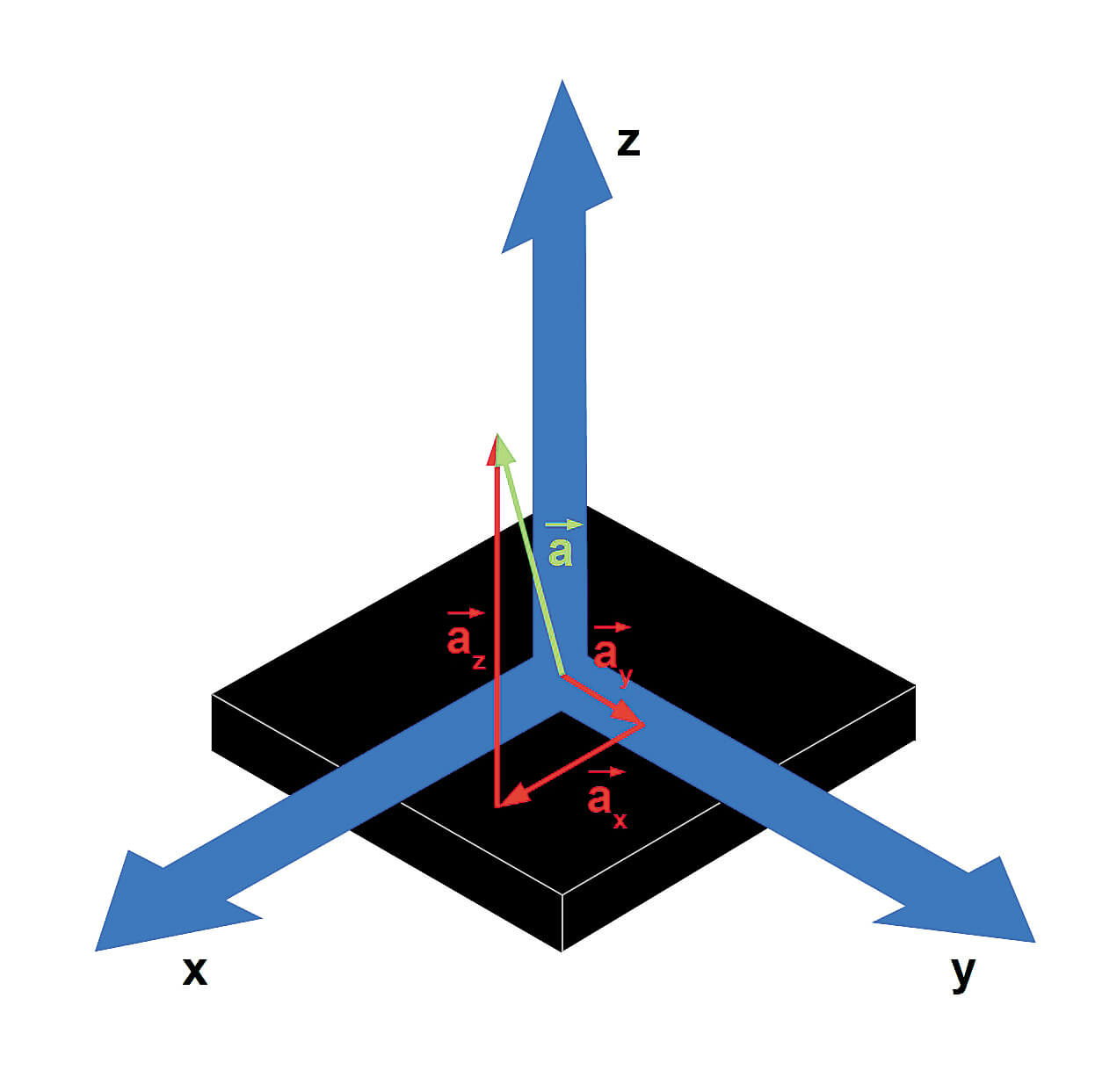
Zur Definition eines kartesischen Vektors: Ein beliebig im Raum liegender Vektor a setzt sich aus der Summe der drei Teilvektoren ax, ay und az zusammen, die jeweils in Richtung der x-, y- und z-Achse des Koordinatensystems zeigen. Durch Addition der skalaren Komponenten dieser Teilvektoren erhält man die richtungsbestimmenden Komponenten des Summenvektors a. Seine Länge (Betrag) wird aus der Wurzel der Summe seiner Komponentenquadrate berechnet. Das Gesagte ist in dieser Gleichung zusammengefasst:
Sensorprinzip
Es gibt eine Vielzahl von Methoden, lineare Beschleunigungen messtechnisch zu erfassen. Eine besonders für die Integration in elektronische Systeme geeignete Form sind MEMS-Beschleunigungssensoren. Bei ihnen wird die Geschwindigkeitszunahme oder -abnahme durch die auf eine Testmasse wirkende Trägheitskraft bestimmt und in achsenbezogene Messwerte umgerechnet.
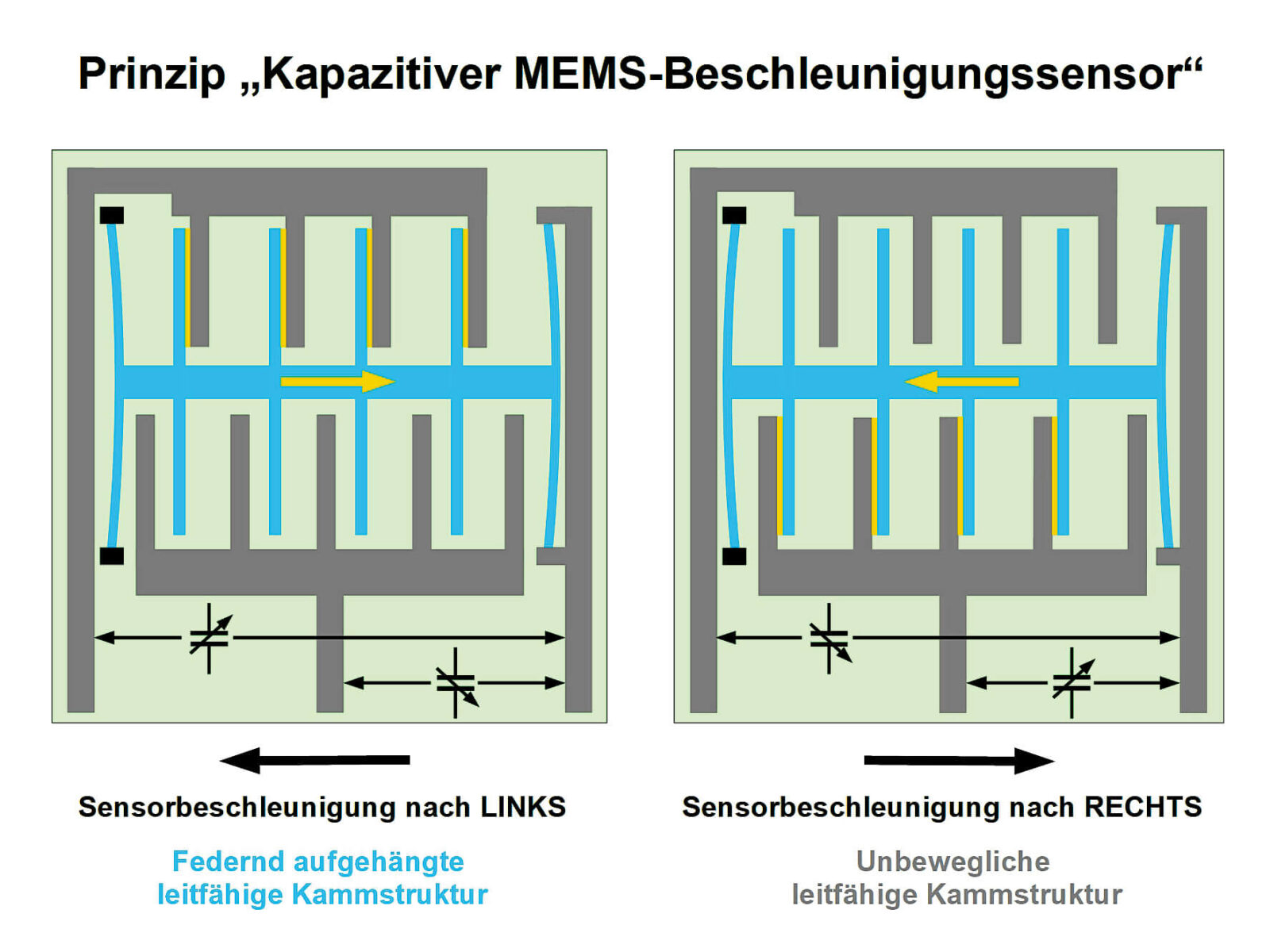
Anhand von Bild 3 soll das Prinzip eines kapazitiven Beschleunigungssensors mit MEMS-Technologie beschrieben werden. In Blau ist eine federnd aufgehängte, leitende Kammstruktur mit nach oben und unten weisenden Zinkenreihen dargestellt. Diese beweglichen Zinken greifen in fest auf dem Halbleitersubstrat angebrachte, kammförmige Gegenstrukturen, mit denen sie zwei Kondensatoren bilden – einen oberen und einen unteren. Wird nun diese MEMS-Struktur quer zur Zinkenrichtung beschleunigt, bewirkt die Trägheit des beweglichen Doppelkamms, dass die zwischen den oberen Kammzinken ausgebildeten Kapazitäten wegen des verringerten Zinkenabstands zunehmen und die zwischen den unteren Kammzinken wegen des vergrößerten Zinkenabstands abnehmen – oder umgekehrt. Gemäß der Gleichung Q = C · U ändert sich die in den beiden Kondensatoren gespeicherte Ladung proportional zur Kapazitätsveränderung, was sich messtechnisch auswerten lässt.
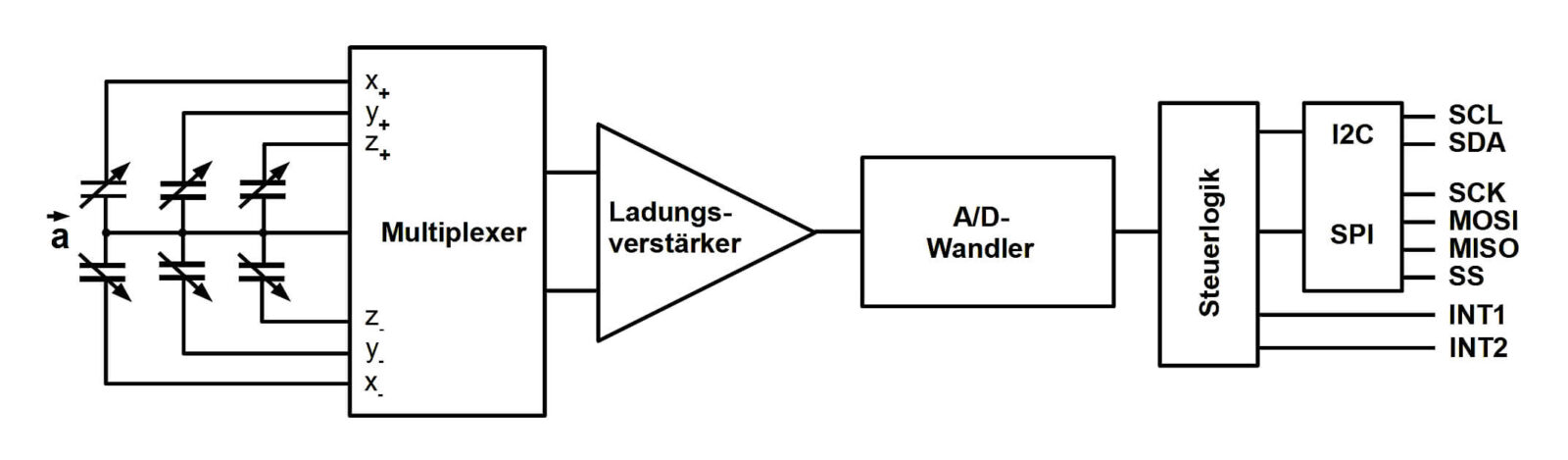
Für eine vollständige Ermittlung der x-, y- und z-Komponenten des räumlichen Beschleunigungsvektors a wirken drei orthogonal orientierte MEMS-Strukturen gemäß Bild 3 für die Raumrichtungen zusammen. Bild 4 zeigt stark vereinfacht das Blockschaltbild einer möglichen Messanordnung.
Einsatzgebiete
MEMS-3-Achsen-Beschleunigungssensoren finden vielfältigen Einsatz
- in der Messung von (linearen) Beschleunigungen
- für die Feststellung von Vibrationen an Gebäuden und Maschinen
- zur Auslösung von Airbags in Fahrzeugen
- in aktiven Fahrzeug-Federungssystemen
- in Alarmanlagen bei beweglichen Gütern oder als Berührungssensor
- als Head-Crash-Schutz bei Festplatten
- in Health-Care-Anwendungen (Gesundheitsvorsorge, Überwachung)
- bei Crashtests in den Dummys und Fahrzeugen
- in der Sensorik von Digitalkameras in Smartphones
- für Schadensuntersuchungen beim Warentransport
- in Beschleunigungsschreibern und Seismographen auf dem Gebiet der Seismik und der Erdbebenüberwachung
- zur Neigungsmessung in statischen Systemen (d. h., solange andere Beschleunigungen im Vergleich zur Erdbeschleunigung vernachlässigbar sind)
- in aktiven Lautsprechern (motional feedback)
- zusammen mit Gyroskopen zur Lageregelung oder Stabilisierung von Luftfahrzeugen wie Hubschraubern oder Drohnen
- zur Steuerung von Videospielen und in Augmented-Reality-Anwendungen
- im Aufzugbau
- für die Satelliten- und Raketentechnik
- in der Analyse von Fahrzeugbewegungen
- für die Autoelektronik
- in Fitnessanwendungen
- usw.
Erdbeschleunigung
Liegt der Sensor unbewegt auf einer horizontalen Unterlage, ist die z-Komponente maximal, die x- und y-Komponente jeweils 0. Das rührt daher, dass der Sensor nun ausschließlich die durch das Gravitationsfeld (Schwerefeld) der Erde verursachte Erdbeschleunigung misst, die mit sehr hoher Genauigkeit lotrecht auf der Erdoberfläche steht. Sie ist für die Beschleunigung eines frei fallenden Körpers verantwortlich und wird deshalb auch Fallbeschleunigung genannt.
Unter der idealisierenden Voraussetzung einer absolut runden Erdkugel mit vollständig homogener Massenverteilung wäre die durch die reine Massenanziehung verursachte Gravitationskraft und damit die Fallbeschleunigung überall auf der Erdoberfläche die gleiche. In der Realität sind aber die Pole der Erde abgeplattet und Gebirge sowie unterschiedliche Gesteinsschichten im Erdinneren verursachen eine (sehr geringe) ortsabhängige Variation der reinen zum Erdmittelpunkt gerichteten Gravitationskraft. Ihr entgegen wirkt aber die Zentrifugalkraft (Fliehkraft), die ein Körper durch die Erdrotation erfährt. Diese Zentrifugalkraft ist im Bereich des Äquators am größten, um dann mit zunehmender geografischer nördlicher und südlicher Breite abzunehmen und an den Polen zu verschwinden. Diese Tatsache, verbunden mit der Abplattung des Erdgeoids an den Polen, bewirkt, dass hier die Gewichtskraft am größten ist.
Die lokale Fallbeschleunigung innerhalb Deutschlands kann mit einem Näherungswert von 9,81 m/s² angegeben werden, der breitenabhängig um bis zu ±0,004 m/s² schwankt. Die Physikalisch Technische Bundesanstalt (PTB) gibt eine Näherungsformel für das mathematische Modell des Normalschwerefeldes g₀ an, in der φ die geografische Breite und HP die Höhe über dem Meeresspiegel darstellt:

Daraus folgt für
München: φ = 48,1372°, HP = 518 m, g₀ = 9,809034425 m/s²,
Frankfurt: φ = 50,1109°, HP = 112 m, g₀ = 9,810803129 m/s²,
Hamburg: φ = 53,595°, HP = 8,6 m, g₀ = 9,813694777 m/s².
Bewegungsbeschleunigung
Wird der 3D-Sensor zusätzlich zur allgegenwärtigen Erdbeschleunigung einer weiteren Beschleunigung im Raum ausgesetzt, die vom Vektor a repräsentiert wird, nehmen die x-, y- und z-Sensoren die in die Richtung der Koordinatenachsen wirkenden Teilbeschleunigungen auf, aus denen sich Orientierung (Richtung) und Stärke (Betrag) des Vektors ableiten lassen.
ELV Smart Home Temperatur- und Beschleunigungssensor ELV-SH-TACO
ELV hat mit dem ELV-SH-TACO (Bild 5) für das Homematic IP System einen Sensor entwickelt, der seine Temperature (Temperatur), Acceleration (Beschleunigung), Concussion (Erschütterung) und Orientation (Ausrichtung) erfassen kann.
Bis auf die Temperatur (T), die von einem NTC (Widerstand mit negativem Temperaturkoeffizienten) erfasst wird, dessen Wert sich verkleinert, wenn seine Temperatur zunimmt, auch Heißleiter genannt, liefert ein triaxialer MEMS-Beschleunigungssensor BMA400 von der Bosch Sensortec GmbH die drei restlichen Größen (ACO) mit 12-Bit-Auflösung über I²C- oder SPI-Schnittstelle.

Zwei Interruptausgänge können beispielsweise die signalverarbeitende Elektronik bei Grenzwertüberschreitungen aus dem Schlafzustand wecken. Der extrem niedrige Stromverbrauch des BMA400 ermöglicht im Zusammenwirken mit dem Ultra-Low-Power-Sub-GHz-Funkmodul CC1310 von Texas Instruments den drahtlosen Betrieb des TACO über mindestens zwei Jahre, ohne die eingesetzte AA-1,5-V-Batterie wechseln zu müssen. Eine detaillierte Beschreibung der Funktion und des Zusammenbaus finden Sie in dem Fachbeitrag „Universaltalent − Temperatur- und Beschleunigungssensor ELV-SH-TACO“.