Temperatur- und Beschleunigungssensor ELV-SH-TACO
ELV-SH-TACO: Universaltalent für Temperatur, Beschleunigung, Erschütterung und Lage
Der ELV-SH-TACO Smart Home Temperatur- und Beschleunigungssensor für den Außenbereich ist im Homematic IP System vielseitig einsetzbar. Er überwacht z. B. Bewegungen und Lageveränderungen an Abfallbehältern, Gartenmöbeln und anderen Objekten. Durch individuell konfigurierbare Meldeschwellen für Beschleunigung und Lageabweichungen passt sich der Sensor flexibel an die gestellten Anforderungen an. Zusätzlich misst das Gerät zuverlässig die Temperatur und übermittelt diese Daten zyklisch an das Homematic IP System, damit dort stets aktuelle Informationen bereitstehen.
Funktionen des ELV-SH-TACO
Beschleunigungs- und Bewegungssensor
Der in dem Bausatz ELV-SH-TACO eingesetzte Beschleunigungssensor Bosch Sensortec BMA400 kann die Beschleunigung in allen drei Achsen (X, Y, Z) messen und daraus entsprechende Daten generieren. Erfährt z. B. eine Achse eine Beschleunigung, kann man von einer Bewegung in dieser Richtung ausgehen und dieses Ereignis programmtechnisch auswerten.
Neigungs-, Erschütterungssensor und Lagebestimmung
Entsprechend kann man auch eine Erschütterung detektieren bzw. eine bestimmte Lage feststellen. Für die Lageermittlung ist übrigens keine Bewegung notwendig. Dies wird deutlich, wenn man bedenkt, dass die mittlere Erdbeschleunigung auf Meereshöhe 9,81 m/s2 beträgt. Ein Körper mit einer Masse von 1 kg erfährt dort also eine Gewichtskraft von 9,81 N (1 N = 1 kg · m/s2). Befindet sich der zu überwachende Körper im Ruhezustand und vom Sensor aus gesehen in der Z-Achse rechtwinklig zum Erdboden, wird in dieser Ebene die Erdbeschleunigung gemessen. Ebenso verändern sich die Werte, wenn sich die Lage verändert, die man dann entsprechend auswerten kann.
Ausgehend von diesen Möglichkeiten durch den Einsatz eines Beschleunigungssensors ergibt sich somit eine Menge von Anwendungsfällen wie z. B. die eingangs erwähnten.
Funktionsweise eines Beschleunigungssensors
MEMS (Miniatur-Elektromechanische Systeme)
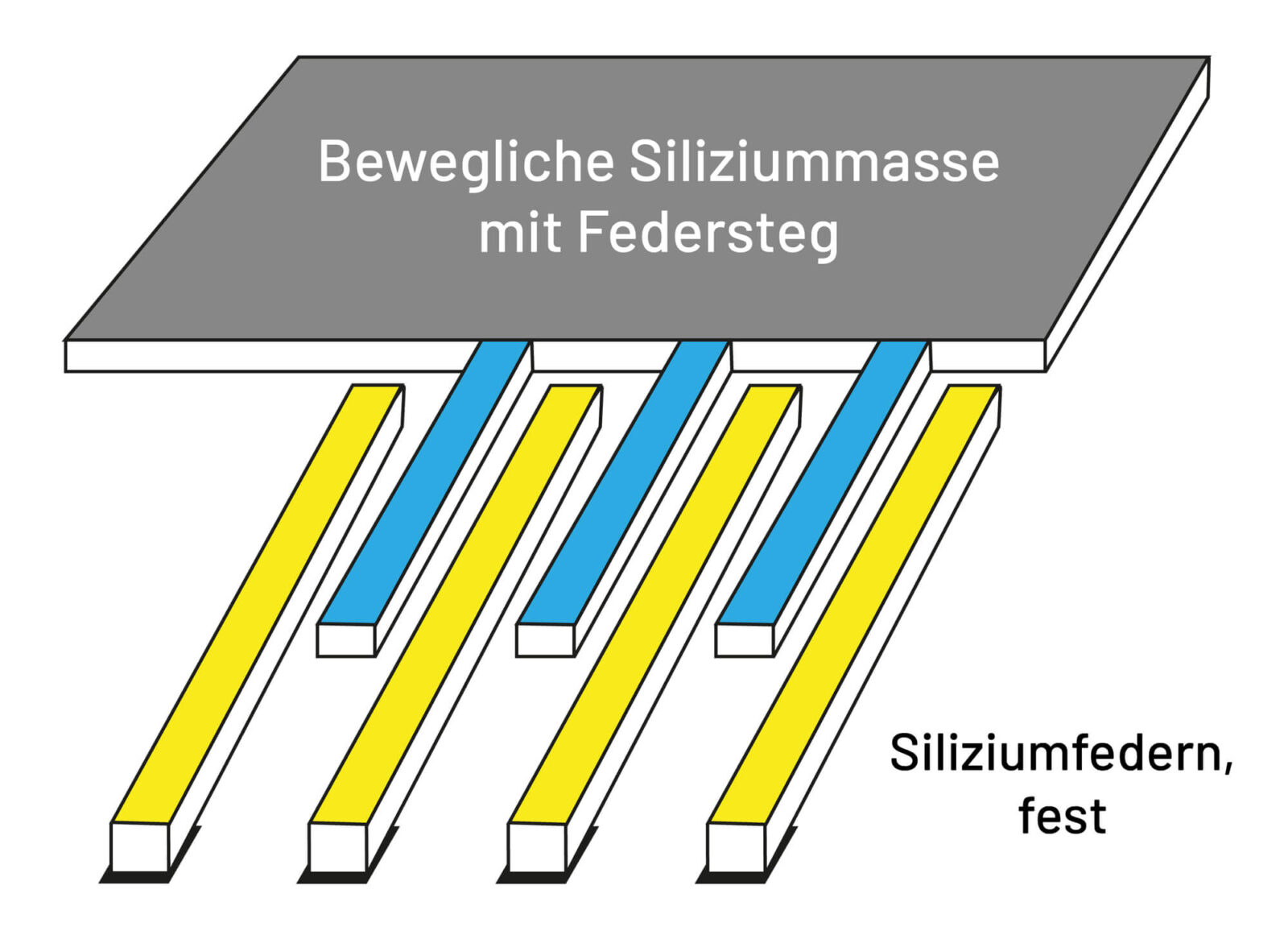
Elektromechanische Systeme sind darauf ausgelegt, dass mechanische Einwirkungen wie Beschleunigung, Rotation oder Luftdruck die elektrischen Eigenschaften des Systems beeinflussen können. Diese Veränderungen können erfasst, durch den Sensor verstärkt und als Ausgangssignal ausgegeben werden (Bild 1). Der Sensor enthält pro Achse (X, Y, Z) zwei kammförmige Strukturen, deren Zinken ineinandergreifen. Eine dieser Strukturen ist fest mit dem übrigen Silizium des Sensors verbunden, während die andere in der Achse senkrecht zu den Zinken beweglich ist. Die beiden Kämme können als Kondensator betrachtet werden. Die Formel für die Kapazität eines Kondensators lautet:
Wenn der Abstand zwischen den Kondensatorplatten mit d bezeichnet wird, ergibt sich bei konstanter Permittivität (ϵr), Fläche (A) und elektrischer Feldkonstante (ϵ0) der Leiterplatten eine proportionale Änderung der Kapazität mit dem Abstand d. Bei kleiner werdendem Abstand steigt die Kapazität und umgekehrt. Wenn der Sensor beschleunigt wird, verändert sich aufgrund der Massenträgheit seines beweglichen Teils der Abstand zwischen den beiden Platten. Diese Kapazitätsänderungen können elektrisch gemessen werden.
Lagebestimmung
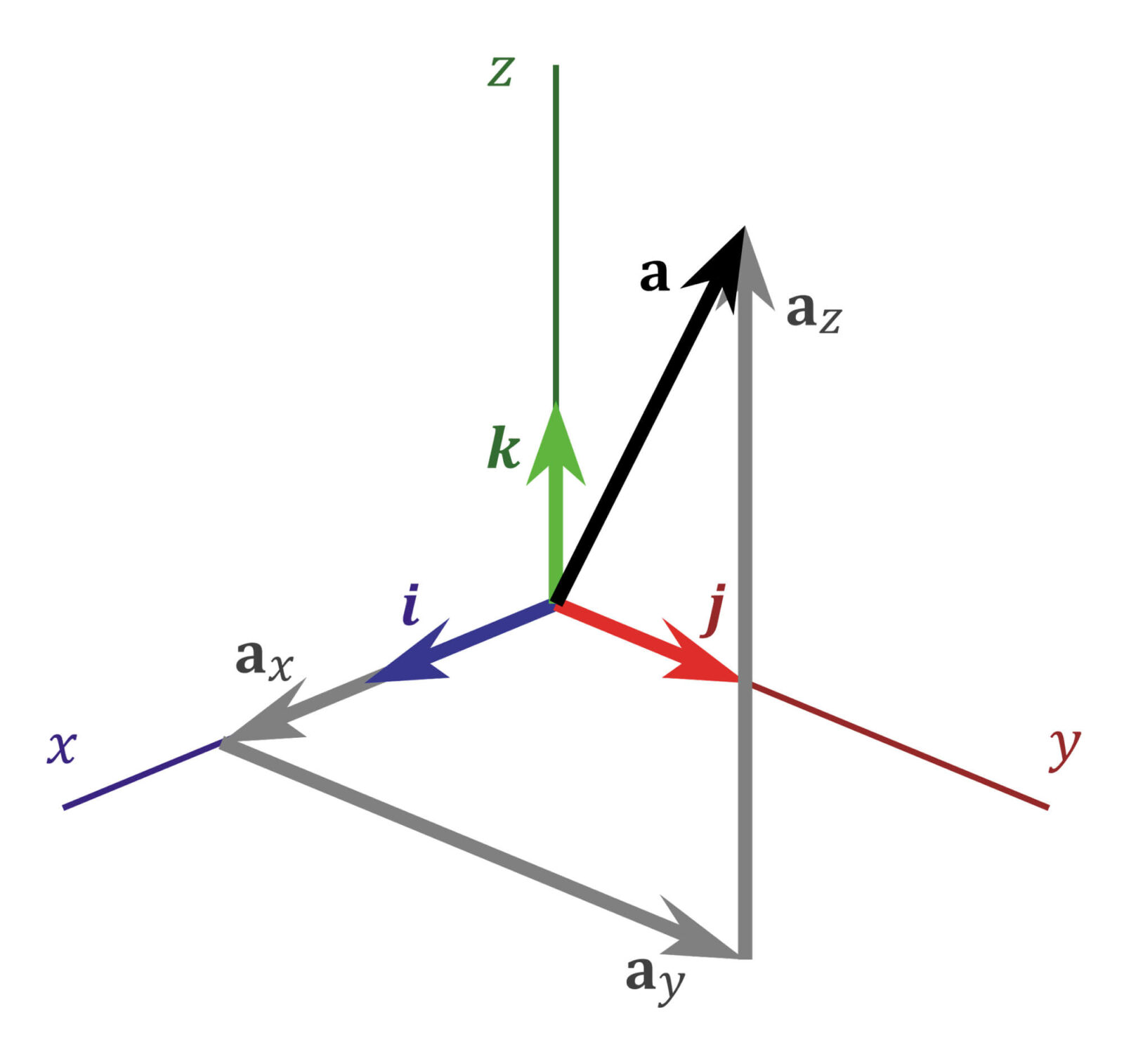
Der Sensor ist ständig der Einwirkung einer Beschleunigung ausgesetzt, nämlich der Erdbeschleunigung. Da der Sensor die Beschleunigung entlang dreier Achsen misst, kann die Beschleunigung, die der Sensor im Ruhezustand erfährt, als dreidimensionaler Vektor (a) dargestellt werden (Bild 2). Auf diese Weise lässt sich ein Vektor für die Ausgangsposition definieren. Mithilfe der Formel zum Skalarprodukt kann der Winkel zwischen dem aktuellen Ausrichtungsvektor und diesem Referenzvektor berechnet werden:
Anwendungsfelder von Beschleunigungssensoren
Beschleunigungssensoren können einerseits Erschütterungen oder Beschleunigungen erkennen. Ein 3-Achsen-Beschleunigungssensor wie der Bosch Sensortec BMA400, der hier verwendet wird, kann auch indirekt die Ausrichtung des Sensors relativ zur Erdbeschleunigung bestimmen. Diese Sensoren finden Anwendung in Smartphones, um die Ausrichtung des Geräts (Portrait oder Querformat) zu erkennen, sowie in Smartwatches, um festzustellen, ob der Benutzer gerade auf das Ziffernblatt schaut. Darüber hinaus verwenden Smartwatches einen solchen Beschleunigungssensor auch als Schrittzähler.
Zusammenbau des ELV-SH-Taco
Infos zum Bausatz
Lieferumfang
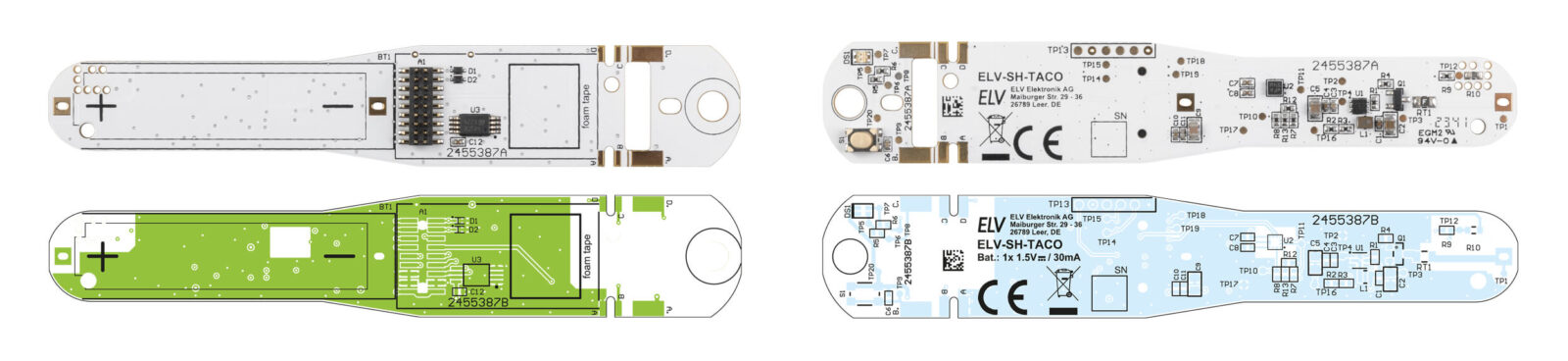
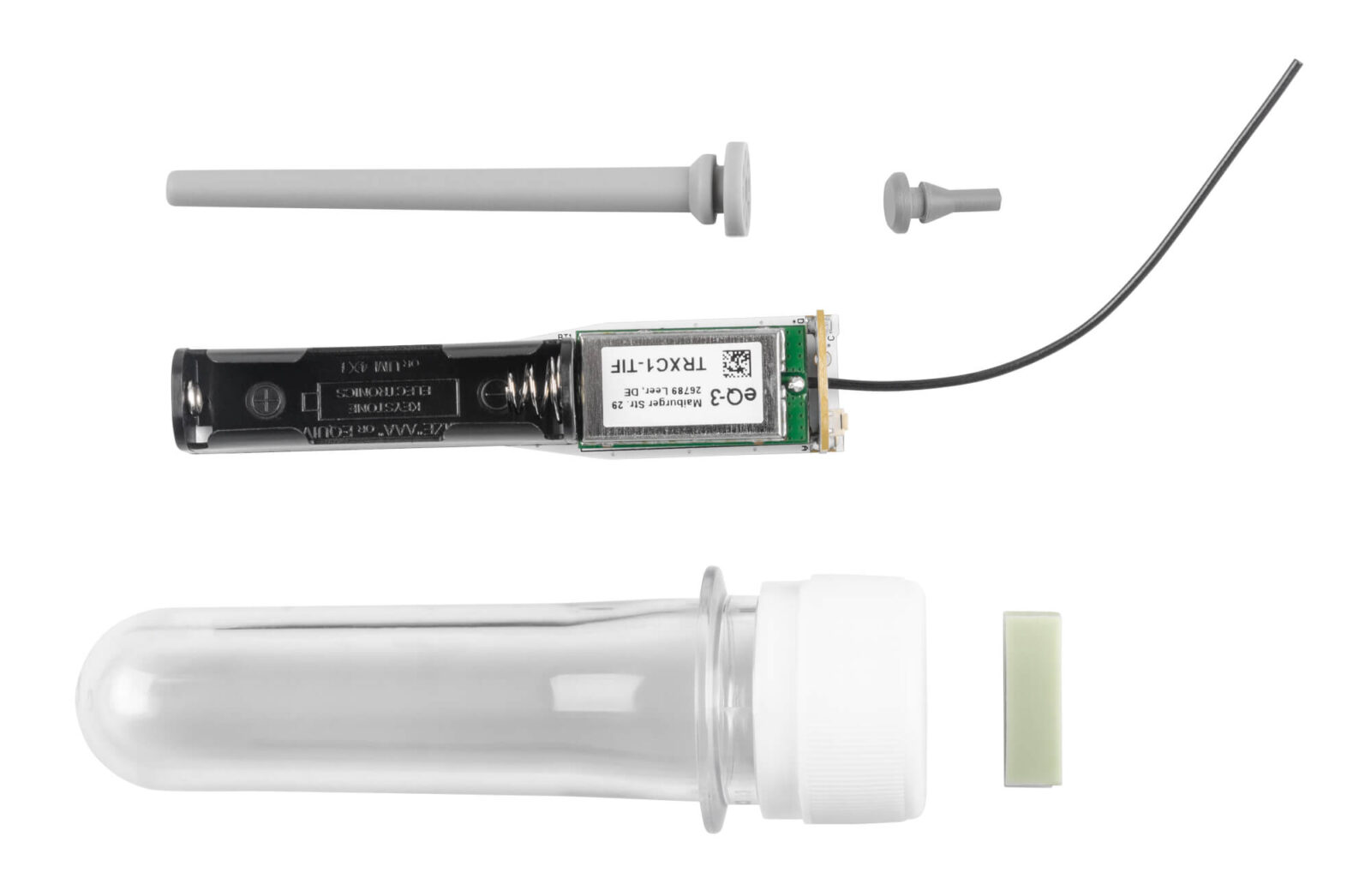
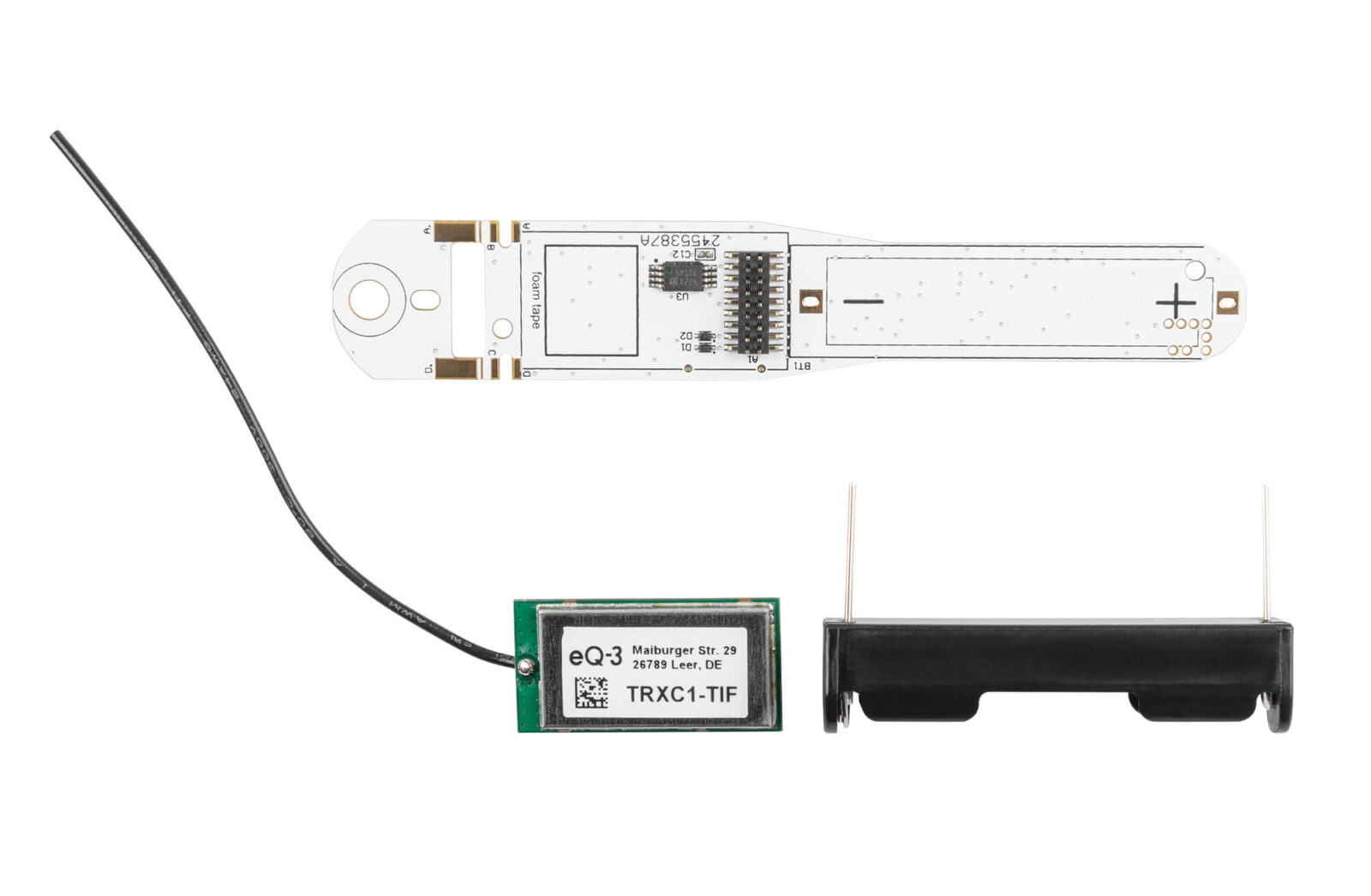
Die Platinenfotos mit den zugehörigen Bestückungsdrucken sind in Bild 4 zu sehen, Bild 5 zeigt den Lieferumfang des ELV-SH-TACO. Die Montage des Geräts erfolgt in unserem konzerneigenen Produktionswerk. Die einzelnen Komponenten der Geräteplatine werden für die bessere Veranschaulichung in den Einzelteilen dargestellt (Bild 6).
Anleitung:
Der Zusammenbau des Geräts wird nachfolgend in einer Schritt-für-Schritt-Anleitung gezeigt.
Schritt 1
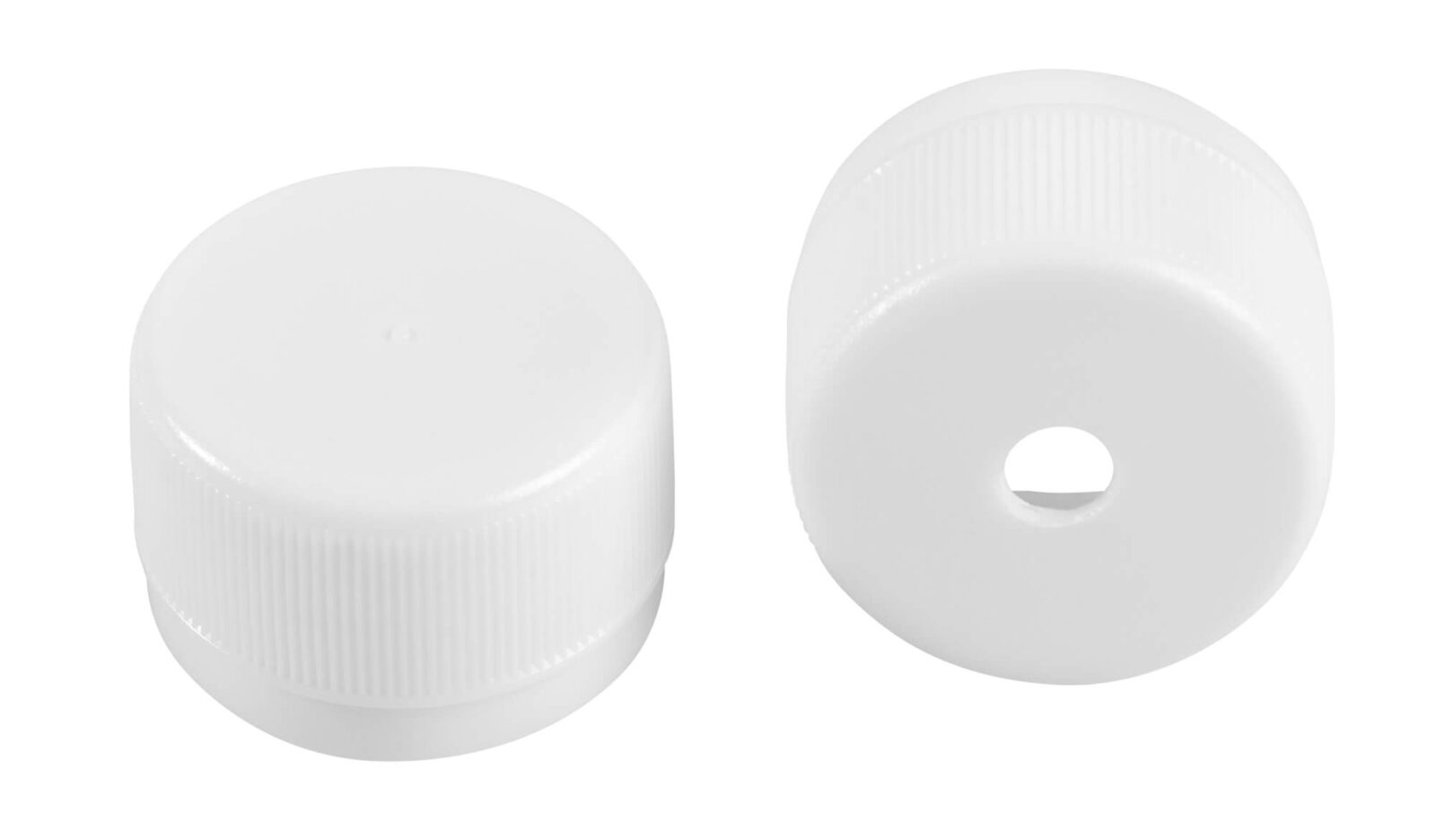
Der Deckel des PET-Rohlings wird abgeschraubt.
Schritt 2
Das Loch im Deckel des PET-Rohlings wird von innen mit niedriger Drehzahl des Bohrers gebohrt (7 mm). Anschließend wird das Loch gereinigt und gegebenenfalls entgratet.
Optional (empfohlen):
Das Bohrlochbereich mit feinem Schleifpapier für bessere Haftung leicht anrauen.
Schritt 3
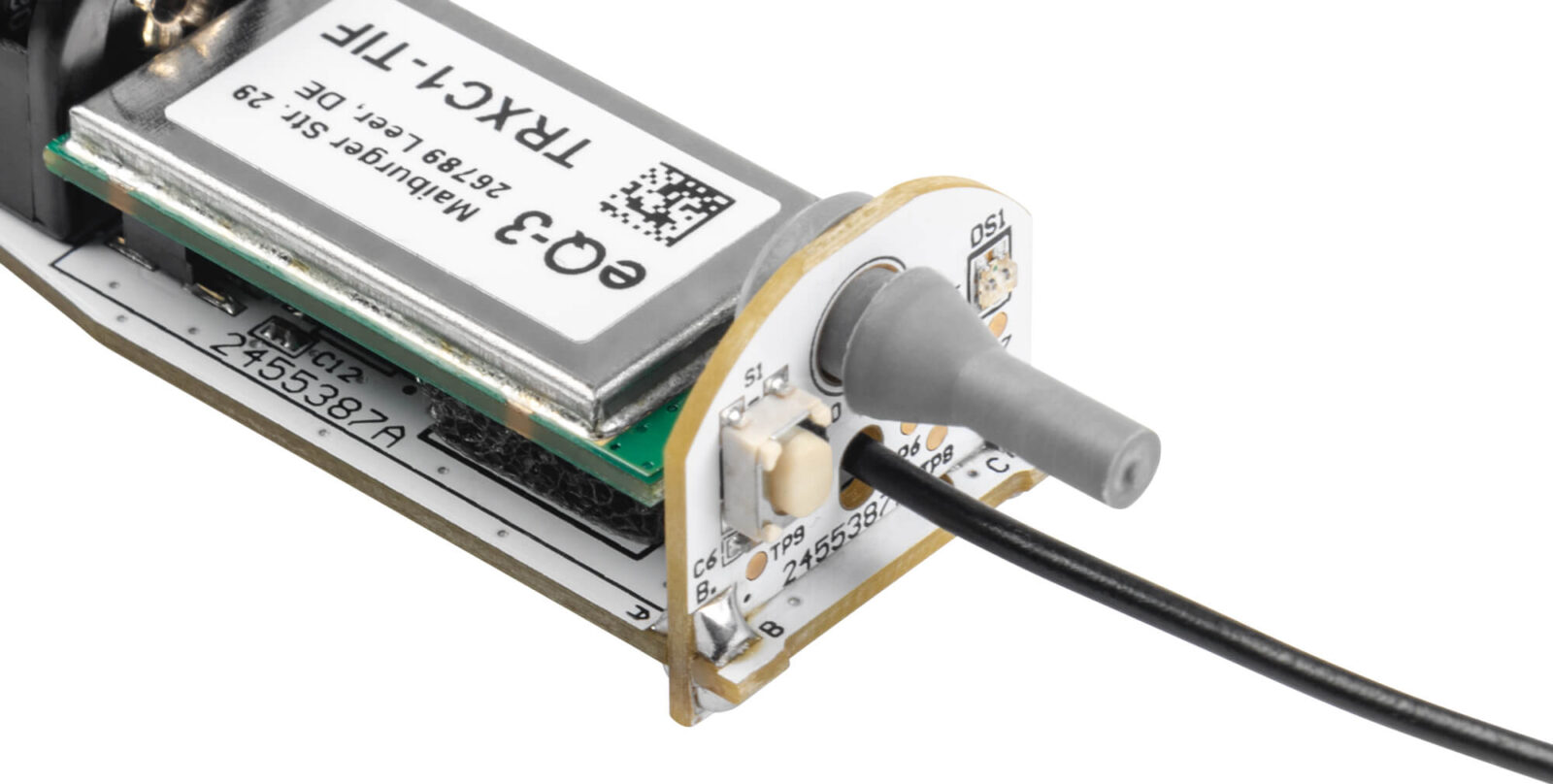
Der Antennenkopf (grau) wird durch das Loch geführt, bis die Lippe einrastet. Danach kontrollieren ob der Sitzt der Antennenkopf plan und spannungsfrei sitzt.

Schritt 4
Der Deckel wird von innen mit ELASTOSIL E43 abgedichtet und fixiert.
Vorgehen:
ELASTOSIL E43 ringsum im Kontaktbereich zwischen Antenne und Deckel (Innenseite) auftragen. Dabei darauf achten das es keine Lufteinschlüsse und eine geschlossene Dichtraupe entsteht.

Schritt 5
Den Deckel nun ruhig lagern (Antenne zeigt nach unten, Deckelöffnung nach oben). Die Aushärtezeit beträgt mindestens 24 Stunden. Währenddessen keine Bewegung kein Druck/Zug auf die Antenne ausüben.
Schritt 6
Der kleine graue Abstandshalter wird von der Seite des Batteriehalters durch das Loch der abgewinkelten Platine gefädelt und durchgezogen, bis die Gummilippe einrastet.
Schritt 7
Die Batterie wird gemäß den Polaritätsmarkierungen im Fach platziert.

Schritt 8
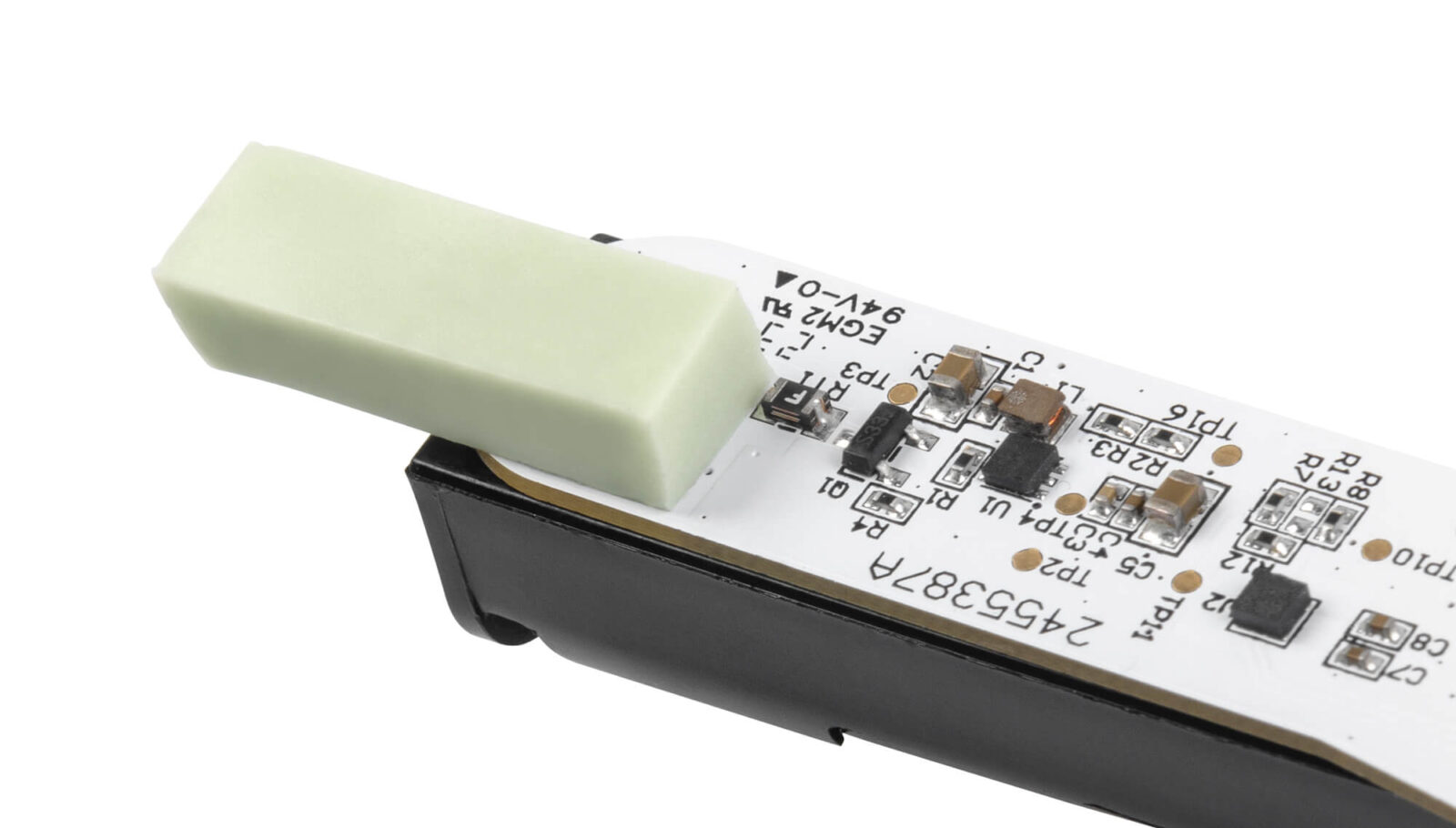
Das mitgelieferte Wärmeleitpad wird beidseitig von der Verpackung befreit und exakt über dem Temperatursensor platziert. Dabei muss darauf geachtet werden, dass das Pad gleichmäßig und fest auf dem Sensor aufliegt.
Schritt 9
Die Platine wird dann behutsam und gleichmäßig bis zum Anschlag in den PET-Rohling eingeschoben.

Schritt 10
Die Geräteantenne wird in den Antennenkopf eingefädelt.

Schritt 11
Der Deckel wird zugeschraubt.
Montage und Inbetriebnahme
Um den PET-Rohling einschließlich des sich darin befindlichen Sensors an seinem Einsatzort zu befestigen, stehen zwei Halterungen (Bild 7) zum Selbstanfertigen als 3D-Druckdateien zum Download zur Verfügung (siehe unten).
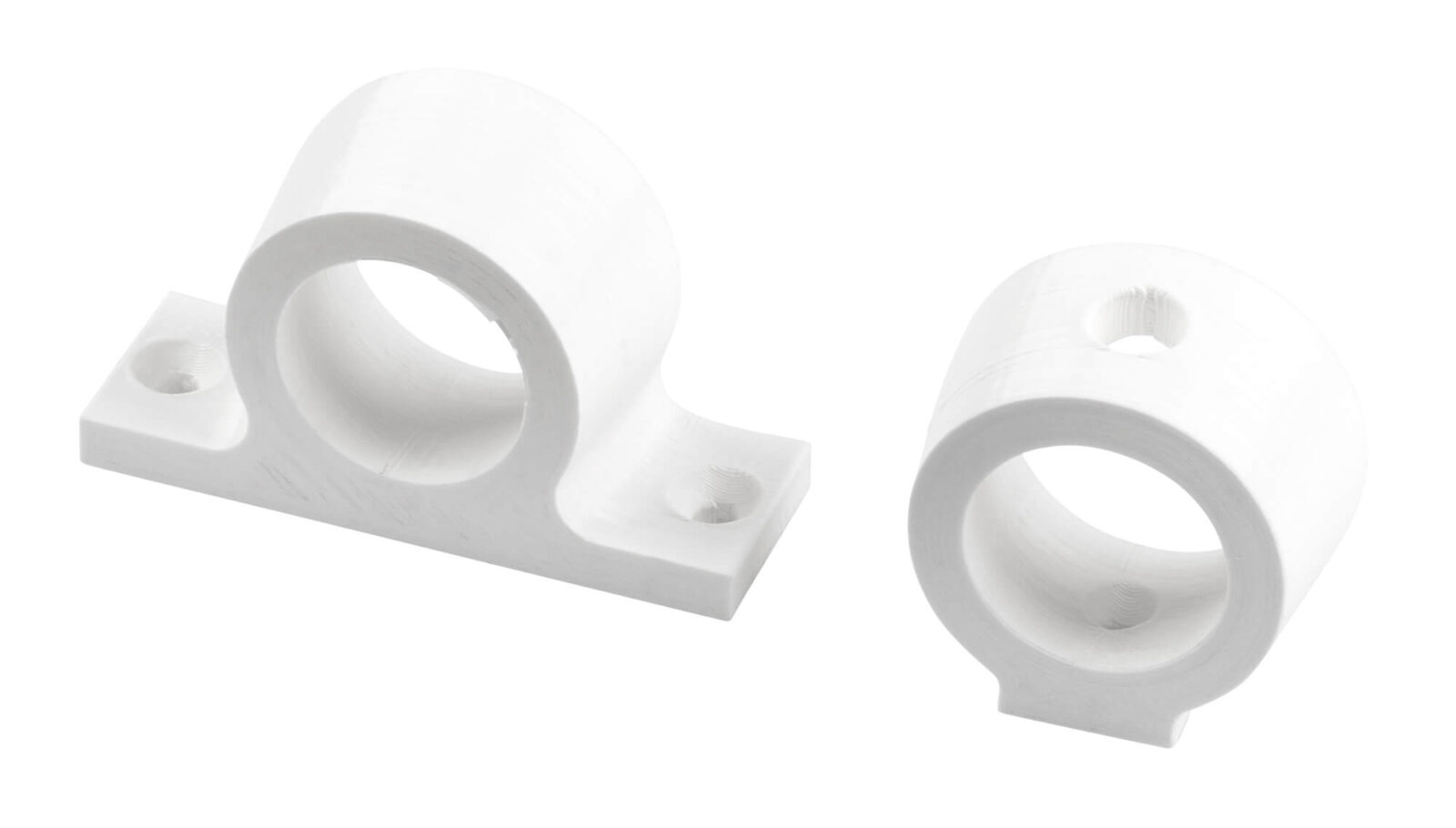
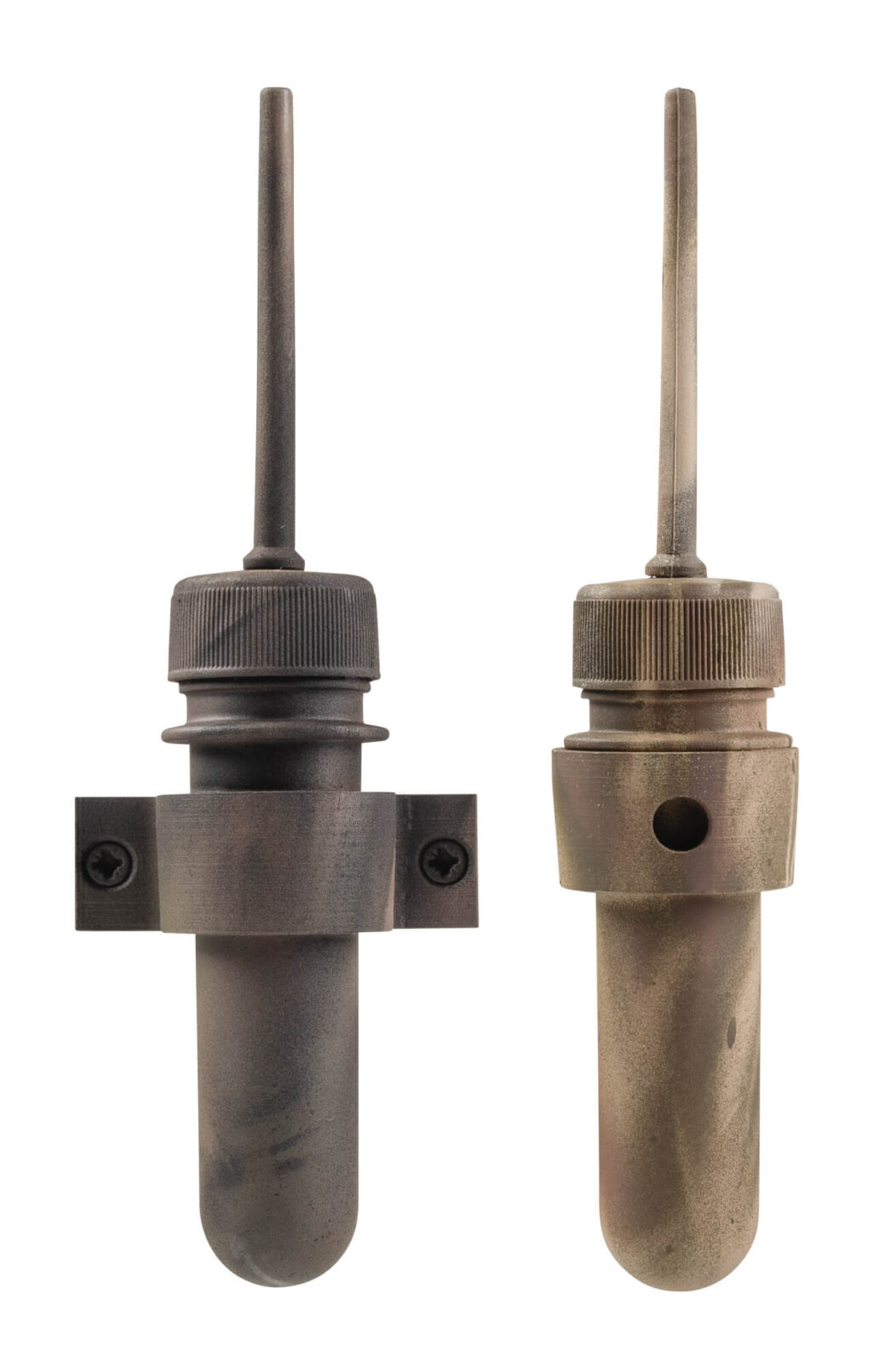
Für Anwendungen im Außenbereich wird empfohlen, ein UV- und witterungsbeständiges Filament wie ASA oder Polyamid zum Druck der Halterungen zu verwenden. Durch das Einsetzen des PET-Rohlings in eine Halterung gestaltet sich die Montage des Geräts sehr einfach. Durch Verschrauben oder Aufkleben auf verschiedenen Untergründen wie z. B. Möbeln, Türen oder Fenstern ergibt sich eine hohe Flexibilität bei der Wahl des Montageorts. Durch die Möglichkeit einer einsatzspezifischen Farbgebung des kompletten Geräts (Bild 8) ist auch eine verdeckte Verwendung in unterschiedlichen Umgebungen möglich.
Konfigurationsmöglichkeiten des ELV-SH-TACO in der CCU3-WebUI
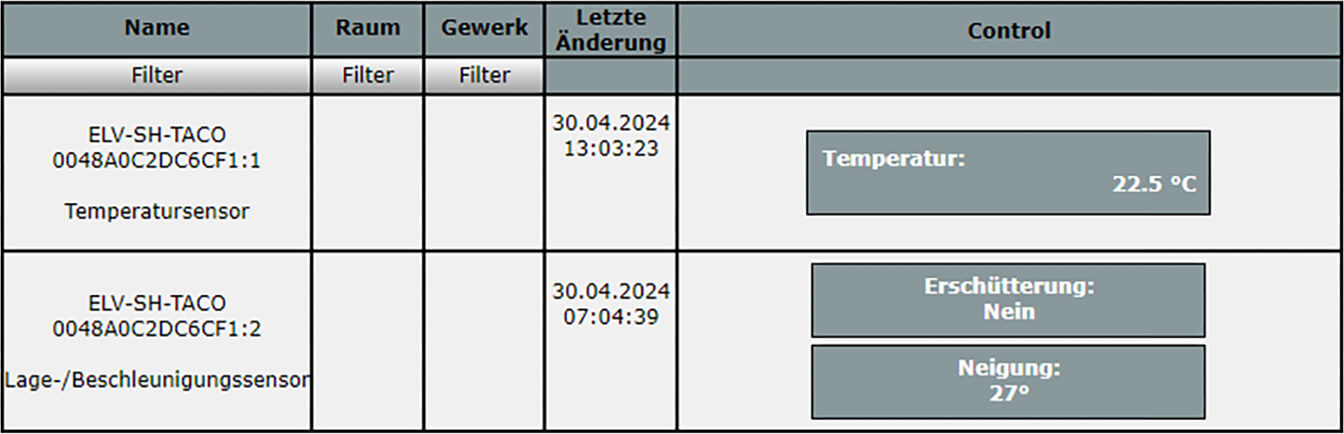
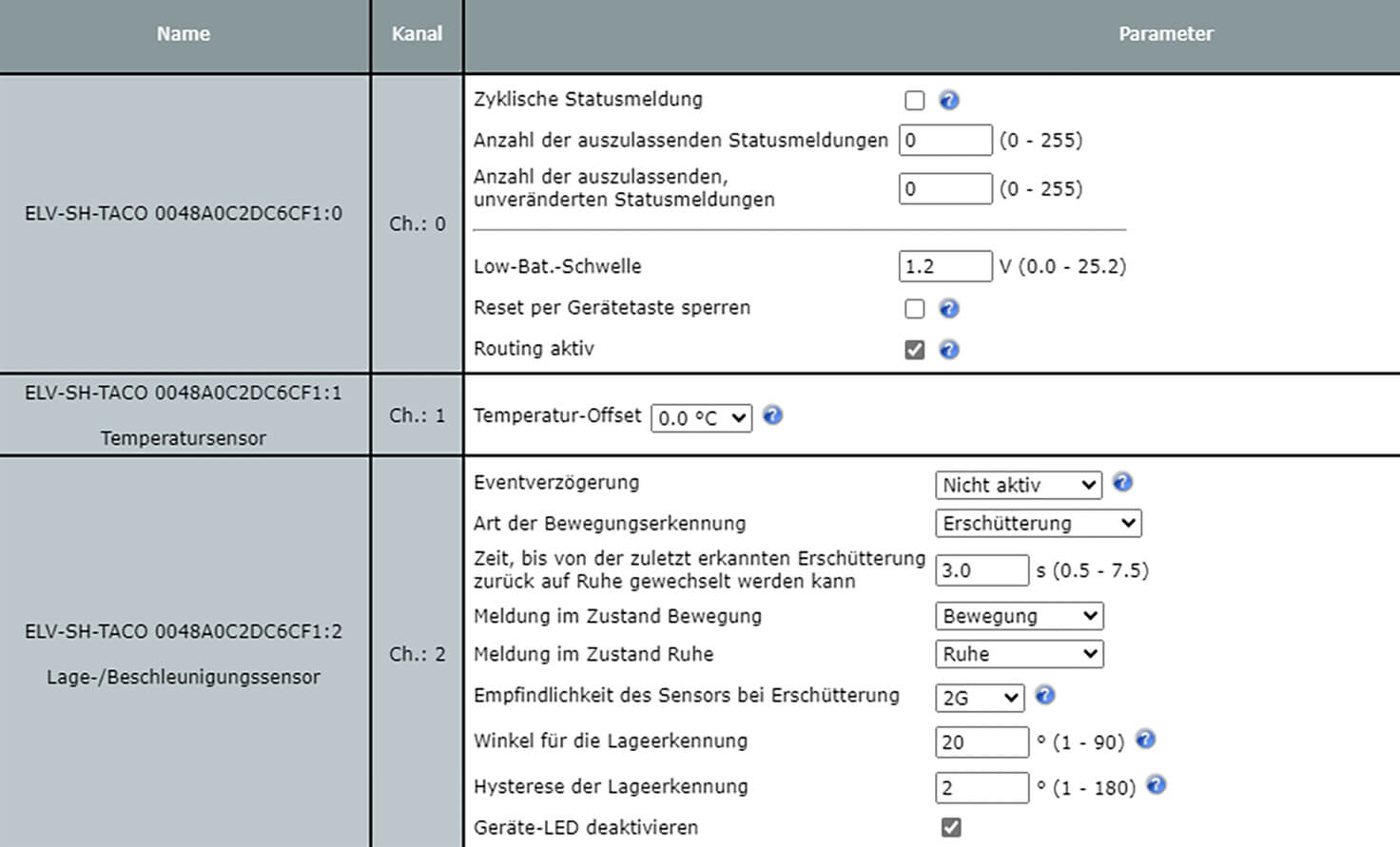
Nach der Inbetriebnahme und Anmeldung an der Zentrale kann der ELV Smart Home Temperatur- und Beschleunigungssensor vielfältig im Außenbereich konfiguriert werden. Bild 9 zeigt den entsprechenden Einstellungsdialog in der CCU3-WebUI.
Im Kanal 0 des Sensors kann festgelegt werden, ob der Sensor zyklische Statusmeldungen seines Zustands von sich aus senden soll. Abhängig von der Anwendung kann es jedoch sinnvoll sein, aus Gründen der Stromersparnis oder der Einhaltung des Duty-Cycle eine bestimmte Anzahl von Statusmeldungen zu überspringen oder Meldungen auszulassen, wenn keine Veränderung bis zur nächsten Statusmeldung erfolgt. Auch diese Einstellung ist hier möglich. Darüber hinaus kann die Systemtaste des Geräts gegen Manipulation gesperrt werden. Bei Aktivierung dieser Option kann kein Werksreset am Gerät selbst ausgelöst werden.
Im Kanal 1 kann ein möglicher Temperaturoffset eingestellt werden, um eventuell vorhandene Störgrößen zu kompensieren. Im Kanal 2 kann zunächst die Verzögerung der Aussendung eines Alarms sowie die Art der Bewegungserkennung eingestellt werden. Um z. B. kurze Erschütterungen oder kurzzeitige Lageänderungen zu ignorieren, kann eine Zeit zum Wechsel der Sensormeldung auf Ruhe eingestellt werden. Anschließend folgen die Bezeichnungen der Meldungen bei Bewegung und Ruhe. Schließlich können als letzte Parameter die Ansprechempfindlichkeit und Winkel für die Erschütterung, die Lageerkennung und die Neigungserkennung festgelegt werden (Bild 10).
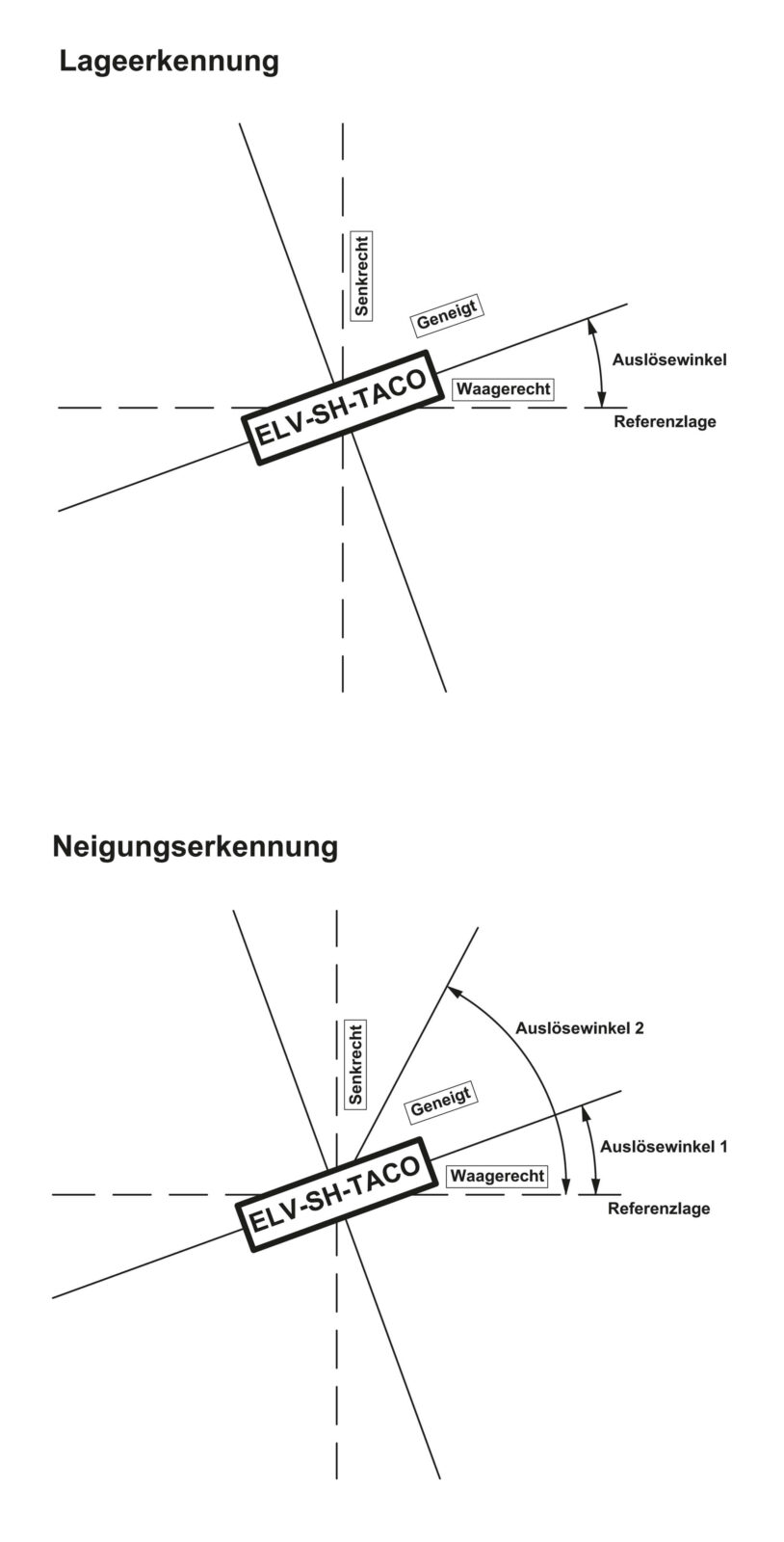
Es ergeben sich neben der einfachen Erschütterungserkennung auch Möglichkeiten zur Lage- oder Neigungserkennung. Die Lageerkennung unterscheidet sich dabei von der Neigungserkennung durch die zwei beziehungsweise drei möglichen Kanalzustände.
Wenn unter „Art der Bewegungserkennung“ die Option „Lageänderung“ ausgewählt wird und eine Auslenkung über den im Feld „Winkel für die Lageerkennung“ eingestellten Winkel erfolgt (Z-Achse relativ zur Referenzlage), wird eine Statusmeldung mit „Geneigt“ übermittelt (Bild 11 oben).
Wenn unter „Art der Bewegungserkennung“ die Option „Neigungserkennung“ ausgewählt wird, erfolgt eine Einteilung über zwei Auslösewinkel (Auslösewinkel 1, Auslösewinkel 2), die festlegen, wann eine Lageänderung von der horizontalen zur geneigten Position bzw. von der geneigten zur vertikalen Position (Z-Achse relativ zur Referenzlage) des Geräts erfolgt. Hierbei kann der Gerätekanal also drei Zustände – senkrecht, geneigt und waagerecht – annehmen (Bild 11 unten).
Schaltungsaufbau des ELV-SH-TACO
Das Schaltbild des ELV-SH-TACO ist in Bild 3 zu sehen. Wir beginnen die Schaltungsbeschreibung mit der an die speziellen Anforderungen angepassten Spannungsversorgung. Da der PET-Rohling nur Platz für eine LR03-Batterie bietet, muss die Nennspannung der Batterie von 1,5 V hochgeregelt werden. Diese Aufgabe übernimmt ein Boost Converter (Aufwärtsregler). Der MAX17225 zeichnet sich durch einen sehr geringen Verluststrom aus und arbeitet am Eingang von Pin 5 mit einer Spannung von 0,4–5,5 V. Am Ausgang von U1 ist eine Spannung von 3 V eingestellt. Die Ausgangsspannung lässt sich mithilfe der Widerstände an Pin 4 einstellen.

Im Datenblatt des MAX17225 findet sich eine Tabelle mit Ausgangsspannungen und den dazugehörigen Widerstandswerten. Für 3 V entspricht dies 133 kΩ. Durch die Reihenschaltung von R2 und R3 wird dieser Wert – unter Berücksichtigung der Bauteiltoleranzen – erreicht. Der Verpolungsschutz wird über den MOSFET Q1 und den Widerstand R4 realisiert. RT1 dient als selbstrückstellende Sicherung in Form eines PTCs. Bei einem erhöhten Stromfluss erwärmt sich das Bauteil, wodurch der Widerstand ansteigt und den Strom begrenzt. Hinter dem Transistor Q1 wird zudem die Batteriespannung (+Vbat) vom Mikrocontroller über Pin 12 gemessen, um eine Warnung bei niedriger Spannung auszugeben.
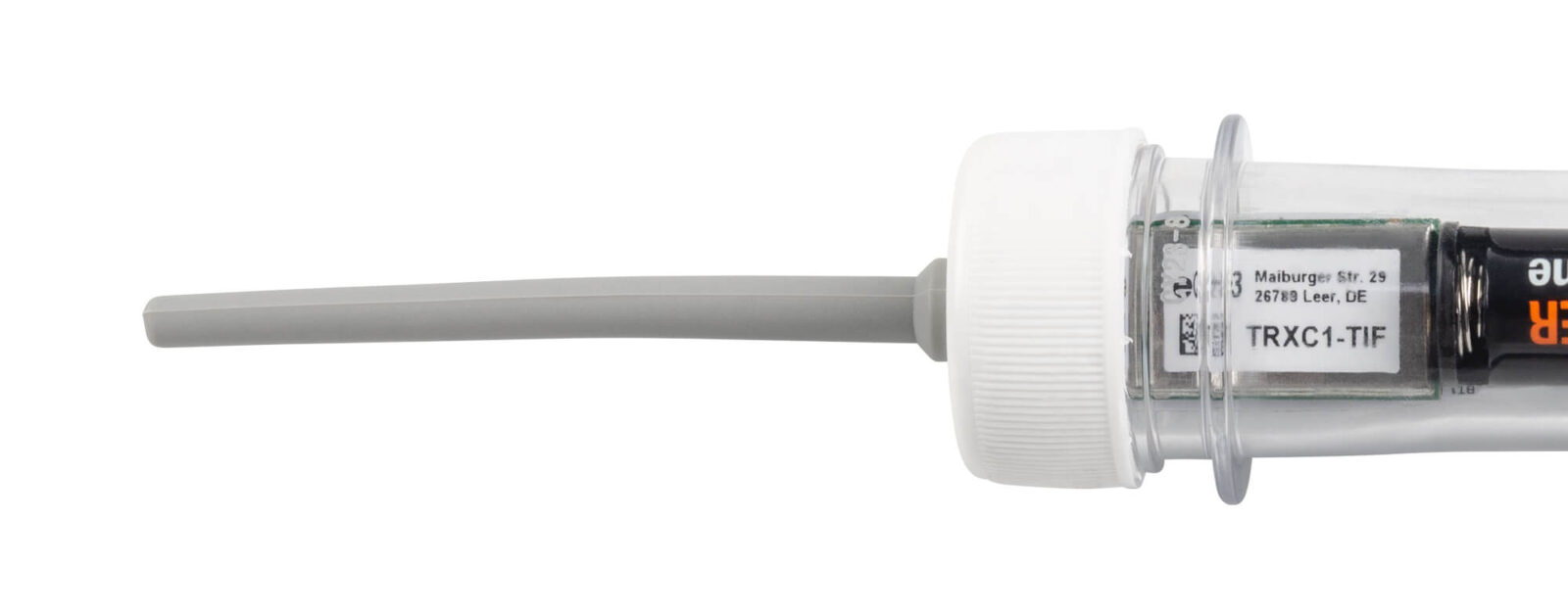
Das Kernstück der Schaltung ist das Transceiver-Modul TRXC1-TIF mit integriertem Mikrocontroller vom Typ Texas Instruments CC1310F128 . Er ist über einen seriellen I²C-Bus mit dem EEPROM U3, der Parameterdaten speichert und als Zwischenspeicher bei einem Firmware-Update dient, verbunden. Die Widerstände R7 und R8 kommen als Pull-up-Widerstände zum Einsatz. Die Kondensatoren C9 bis C11 dienen der Stabilisierung und Filterung der Versorgungsspannung. Auf dem separaten Platinenteil wird der Systemtaster S1 mit C6 als Abblockkondensator versehen. Zur Peripherie des Controllers gehört auch die Duo-LED DS1 samt zugehörigen Widerständen R5 und R6, welche die verschiedenen Betriebszustände, z. B. bei der Inbetriebnahme und Anmeldung an die Zentrale oder beim Senden an die Verknüpfungspartner, mit den Farben Rot, Grün und Orange signalisiert. Eine weitere Hauptkomponente der Schaltung ist der Beschleunigungssensor BMA400 von Bosch (U2), der über I2C angesprochen wird. Er zeichnet sich durch eine sehr geringe Stromaufnahme aus, sowohl im Ruhezustand als auch im Normalbetrieb. Am BMA400 können weiterhin zwei Interrupt-fähige Pins des Mikrocontrollers verwendet werden, um auf bestimmte Ereignisse zu reagieren und den Mikrocontroller z. B. aus dem Schlafmodus zu wecken. Auf diese Weise kann eine Erschütterung am Sensor den Interrupt am BMA400 aktivieren, sodass der Mikrocontroller geweckt wird und per I2C eine Abfrage an den BMA400 stellt. Die Temperaturmessung erfolgt über den Messwiderstand R10 mit seinem während der Messung zugeschalteten Pull-up-Widerstand R9. Die Auswertung erfolgt über den Analog-Digital-Wandler des Mikrocontrollers.
Technische Daten
| Geräte-Kurzbezeichnung: | ELV-SH-TACO |
| Versorgungsspannung: | 1x 1,5 V LR03 |
| Stromaufnahme: | 30 mA max. |
| Batterielebensdauer: | 2 Jahre (typ.) |
| Umgebungstemperatur: | -20 bis +55 °C |
| Funk-Frequenzband: | 868,3 MHz / 869,525 MHz |
| Max. Funk-Sendeleistung: | 10 dBm |
| Empfängerkategorie: | SRD category 2 |
| Typ. Funk-Freifeldreichweite: | 525 m |
| Duty-Cycle: | < 1% pro h / < 10% pro h |
| Winkel: | 0–180°, ± 1° |
| Temperatur: | -20 bis +55 °C, ± 1% @ 25°C |
| Abm. (Ø x L) / Länge Antenne: | 33 x 103 mm / 70 mm |
| Gewicht (inkl. Batterie): | 50 g |
Stückliste
| Widerstände: | |
| 0 Ω/SMD/0402 | R1, R12 |
| 220 Ω/SMD/0402 | R5 |
| 390 Ω/SMD/0402 | R6 |
| 1,8 kΩ/SMD/0402 | R7, R8 |
| 10 kΩ/SMD/0402 | R4, R9 |
| 33 kΩ/SMD/0402 | R2 |
| 100 kΩ/SMD/0402 | R3 |
| NTC/10 kΩ/SMD/0603 | R10 |
| PTC/0,5 A/6 V/SMD | RT1 |
| Kondensatoren: | |
| 100 pF/50 V/SMD/0402 | C11 |
| 1 nF/50 V/SMD/0402 | C6 |
| 10 nF/50 V/SMD/0402 | C3 |
| 100 nF/16 V/SMD/0402 | C1, C4, C7, C8, C10, C12 |
| 4,7 μF/16 V/SMD/0805 | C9 |
| 10 μF/16 V/SMD/0805 | C2, C5 |
| Halbleiter: | |
| MAX17225ELT/SMD | U1 |
| BMA400/SMD | U2 |
| M24M01-DF DW 6 T G/TSSOP-8 | U3 |
| IRLML6401/SMD | Q1 |
| PESD3V3S1UB/SMD | D1, D2 |
| Duo-LED/rot/grün/SMD | DS1 |
| Sonstiges: | |
| Speicherdrossel, SMD, 2,2 μH / 1,5 A | L1 |
| Batteriehalter für 1x LR03 | BT1 |
| Taster mit 0,9 mm Tastknopf, 1x ein, SMD, 2,5 mm Höhe | S1 |
| Sende-/Empfangsmodul TRXC1-TIF mit Stiftleiste 2x 9-polig und 2,0-mm-Stiften, SMD | A1 |
| PET-Flaschenrohling, transparent, mit weißem Deckel | |
| Antennenkopf, grau | |
| Gummi-Gehäusefuß, grau, flachzylindrisch | |
| Schaumstoff, 12 x 10 x 4 mm, selbstklebend | |
| Wärmeleitfolie ELV-SH-TACO |